Thruster high force /Brushless type (sensor feedback) , high precision in controlling both Torque mode and Velocity mode : V15Q3
-2.1 Underwater Thruster – Left hand prop.Motor Brushless with hall sensor
2.2 Underwater Thruster - Right hand prop. Motor Brushless with hall sensor

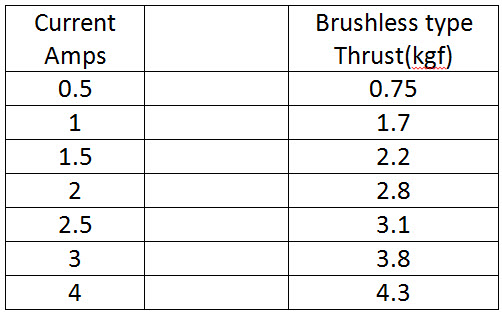
Thrust Current Rating (24-28v)
Thrust Current Rating (36-40v)
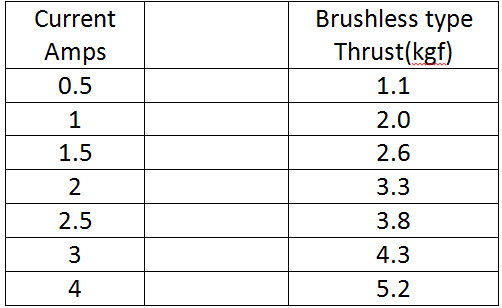
Note:
A: The current rating for a moving UROV can be as much as 25% – 35% lower than the current rating indicated above depending on UROV size and weight.
B: Continueous current can be max. around 30%-45% of above with peak current as double related to peak thrust in double force/thrust (kgf)
Water Tight Mechanism Assy: to water resistance depth > 25M-45M ,Optional : Depth > 45M or more . –call
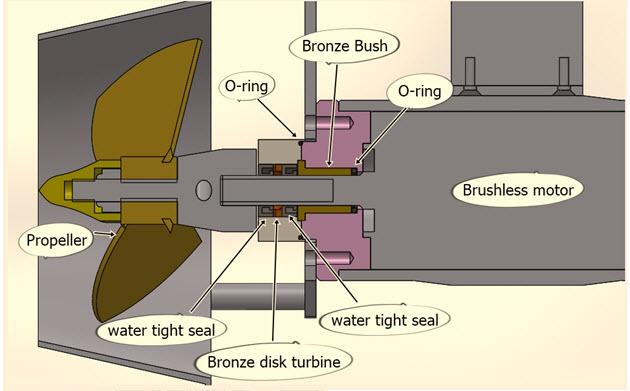
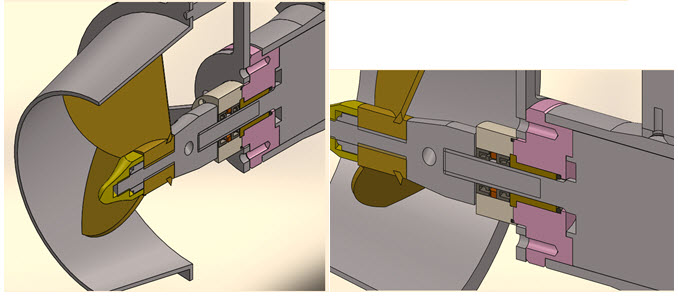
All Mechanical Seal(water tight) from PIC-Design dev. of www.rbcbearings.com (USA)
Alternative for normal water or Salt water(sea water) with hard anodized coated : Call
A.Thruster Mounting Bracket X1 Set (left or right ) = Optional

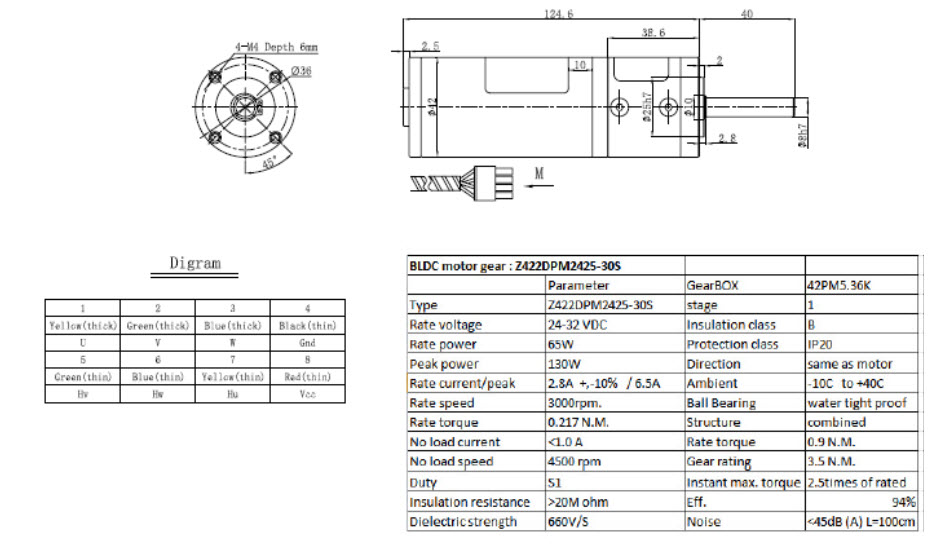
DC Brushless motor with hall feedback sensor inside Thruster :
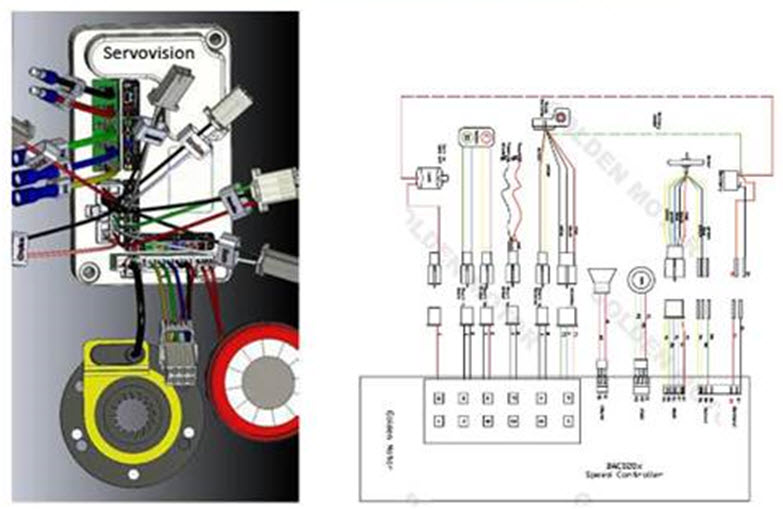
Brushless controller : Programmable ,Low cost Version for Thruster brushless 60W , 24V -36V
Brushless controller for Thruster 60W : 300-1000watt, programmable 24V-48V ( Low Cost Version )
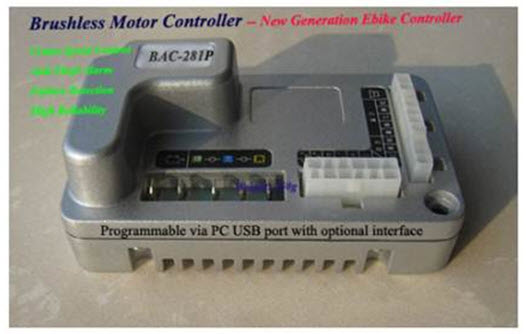
See = http://www.servovision.com/hub%20motor/motor_controller_cruise.html
1.1 Programming cable USB = Optional
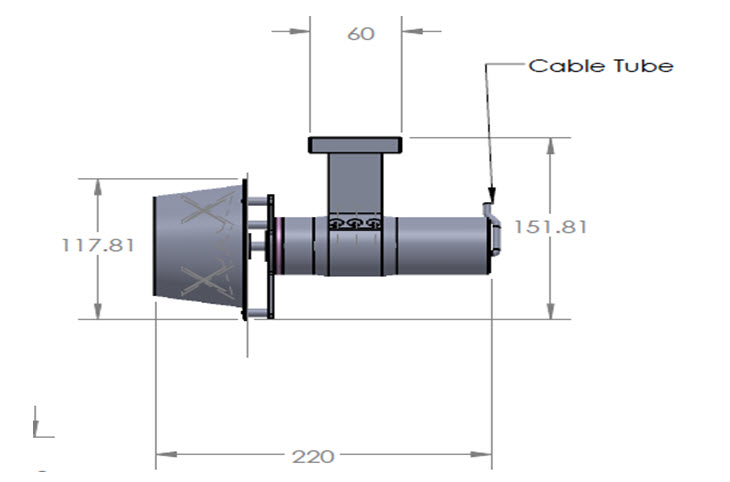
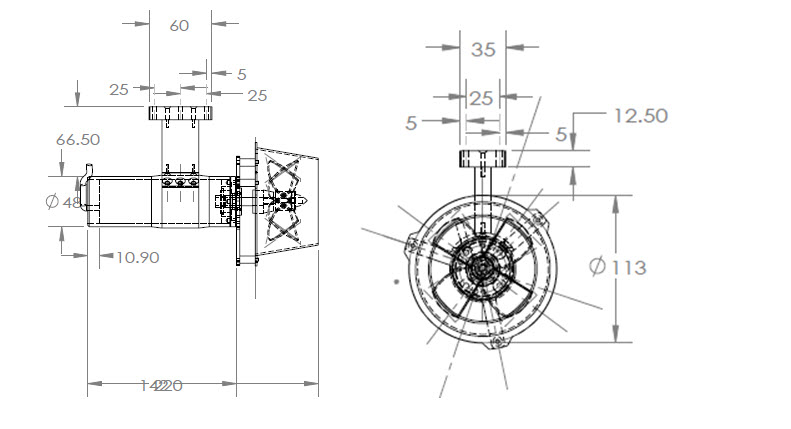
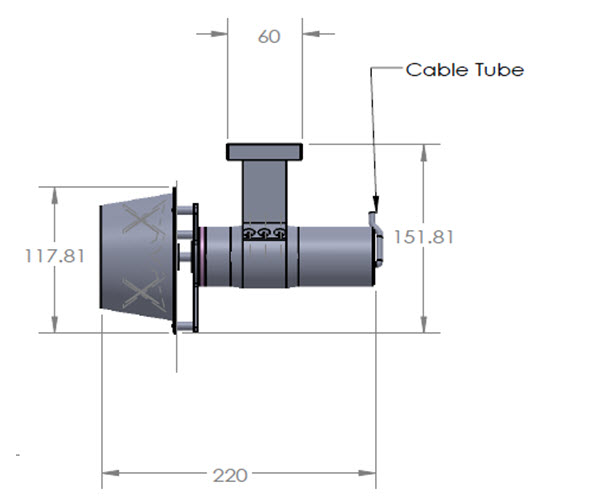
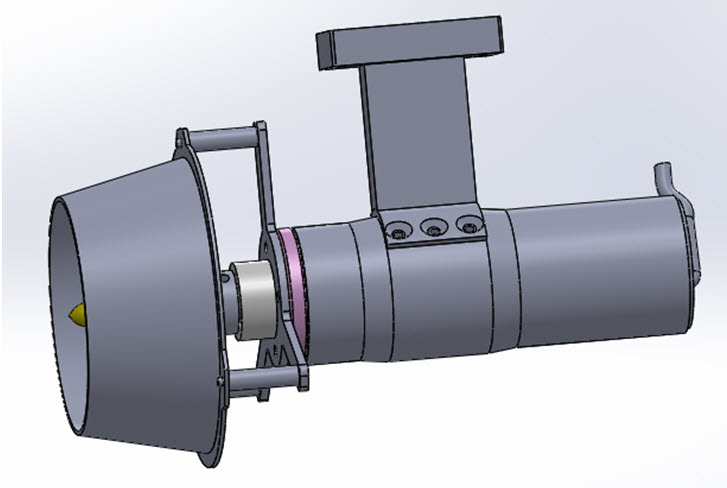
Drawing , dimension and 3D eDrawing : 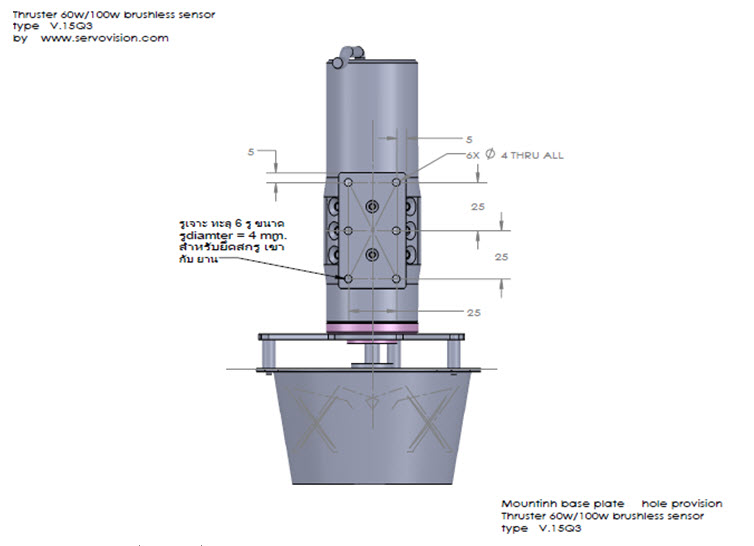
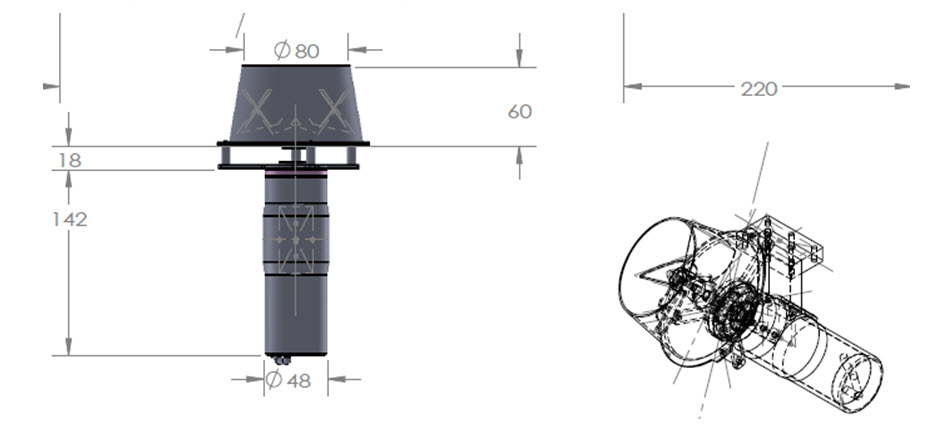
3D Photo :
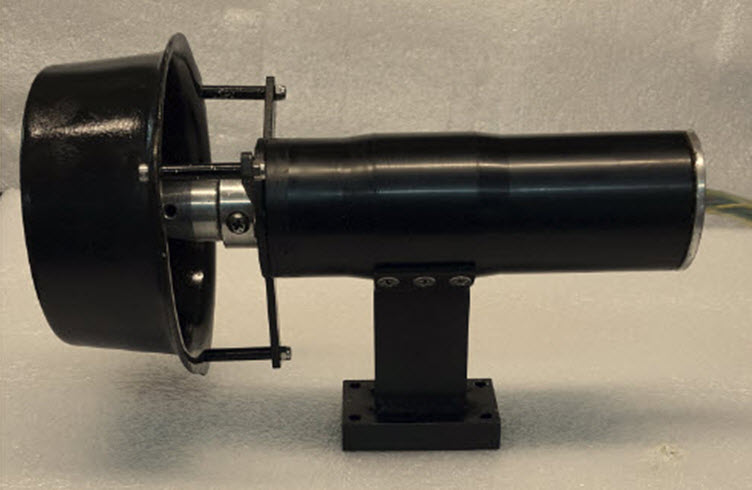
ACTUAL Photo :




ROV : fully automated Underwater ROBOT
|
