
Digital Servo & Stepper Amplifiers
Accelnet
Digital CANopen Amplifi er for Brushless/Brush Motors

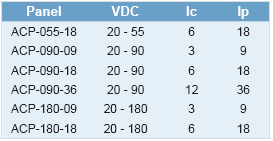
Accelnet Panel
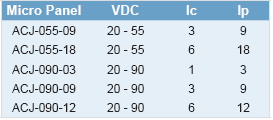
Accelnet Micro Panel

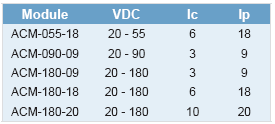
Accelnet Module

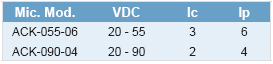
Accelnet Micro Module

Control Modes Indexer, Point-to-Point, PVT
Camming, Gearing, Position, Velocity, TorqueCommand Interface CANopen/DeviceNet
EtherCAT (Panel option)
MACRO (Panel option)
ASCII and discrete I/O
Stepper commands
+/-10V velocity and torque command
PWM velocity and torque command
Master encoder (Gearing/Camming)Communications CANopen/DeviceNet
EtherCAT & MACRO (Panel option)
RS232Feedback Digital quad A/B encoder
Aux. encoder/encoder out (Panel, Micro Panel)
Analog sin/cos encoder (Panel, Micro Panel option)
Digital Halls
Yaskawa, Panasonic, Endat 2.2, Hiperface encoders
(EtherCAT, MACRO drives)I/O – Digital 8-12 inputs, 2-4 outputs Dimensions Panel: 168 x 99 x 31 mm (6.6 x 3.9 x 1.2 in)
EtherCAT, MACRO: 196 x 99 x 31 (7.7 x 3.9 x 1.2)
Micro Panel: 97 x 64 x 33 mm (3.8 x 2.5 x 1.3 in)
Module: 102 x 69 x 25 mm (4.0 x 2.7 x 1.0 in)
Micro Module: 64 x 41 x 16 mm (2.5 x 1.6 x 0.6 in)